Lab 12: Path Planning and Execution
Objective
The objective of this lab is to navigate the robot on the map through a set of given waypoints. The waypoints are in feet:
1. (-4, -3)
2. (-2, -1)
3. (1, -1)
4. (2, -3)
5. (5, -3)
6. (5, -2)
7. (5, 3)
8. (0, 3)
9. (0, 0)
The map looks like this: (from Lab description)
Strategy
My strategy was to move using feedback control, localize to determine position, and then move again. Further, to move I would take advantage of the motion model we used in the previous lab, the turn-go-turn procedure. For example to get from the first waypoint at (-4,-3, O) (x coordinate, y coordinate, and angle) to the second waypoint (-2,-1,0), I would turn 45 degrees counter clockwise using orientation control, move 2.83 feet using position control, and then rotate 45 degrees clockwise back to zero degrees again using orientation control. Then, the robot would localize to see if it achieved its goal. If the robot was within a .3 meter radius then it would be deemed a success and the next path would be executed.
Setup
My first step for the lab was integrating all the code I had written over the past few labs. To successfully complete this path, my robot needed to be able to control it’s movement. It needed a way to precisely tell how far forwards and backwards it was moving. It needed a way to also to know its orientation. Finally it needed the ability to localize on the map.
This was initially difficult because to accomplish all three of those previous tasks which I did in Labs 6, 9, and 11 respectively I had modified my robots program so that it could only do that one thing. However, I was able to combine all of these things into three different switch cases. The code is linked right here.
Next I had to make modifications to the jupyter notebook. I had to modify the notification handler to parse the data as it received it.
curr_dist= 0
async def string_notification(uuid, bytearray):
global curr_dist
s = (ble.bytearray_to_string(bytearray))
LOG.info(ble.bytearray_to_string(bytearray))
s = s.split("|")
for i in s:
if (i[:2] == "D2"):
robot.dist.append(float(i[3:]))
if (i[:2] == "YA"):
robot.yaw.append(float(i[3:]))
if (i[:2] == "QD"):
curr_dist = (float(i[3:]))
ble.start_notify(ble.uuid["RX_STRING"],string_notification)
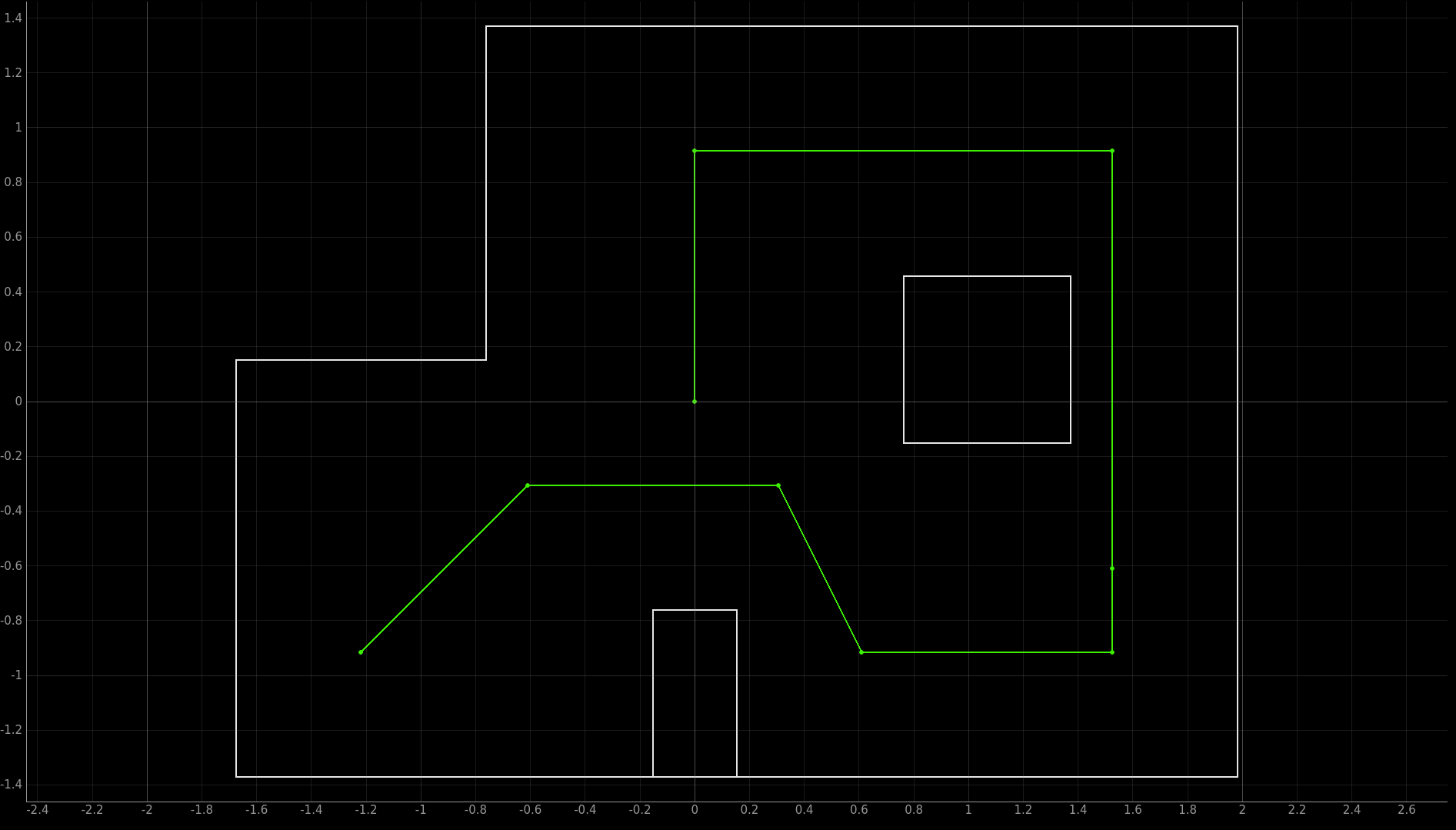
After some testing, I came to the conclusion that my sensor for my yaw was too inaccurate. Although I had gone through the process of calibrating it through accounting for sensor drift, the robot would still overtime lose its orientation and become askew. Each time the robot localized it believed it’s angle was different than the actual robot angle. All of these small inaccuracies would slowly add up and although the point of localization is to fix this issue, I was not confident it would come together to work properly. Instead I readjusted my strategy to just move through the waypoints using position and orientation control and not using localization to determine where I was. Here was my new trajectory to fully take advantage of the ToF sensors.
An additional issue with the ToF sensors is that the were more accurate at sensing range when the wall was up close. To take advantage of this I would either move forwards or backwards depending on which wall was closer. From points 2 to 3 and 7 to 8 I move backwards. Additionally to compensate for the turns not being accurate, I only made 90 degree turns so that I wouldn’t have to worry about getting the angle exactly perfect, because it was easier to make sure I could do a 90 degree turn well. Any other turn like a 180 degree or 270 was just a series of 90 degree turns. Additionally I took advantage of the compute_control function that was given to compute the distance between points. All that was left was to execute the program. I had to make small changes to the gain in places where the robot was moving too quickly. Additionally, I had to change the location of some of the points to avoid obstacles a bit better.
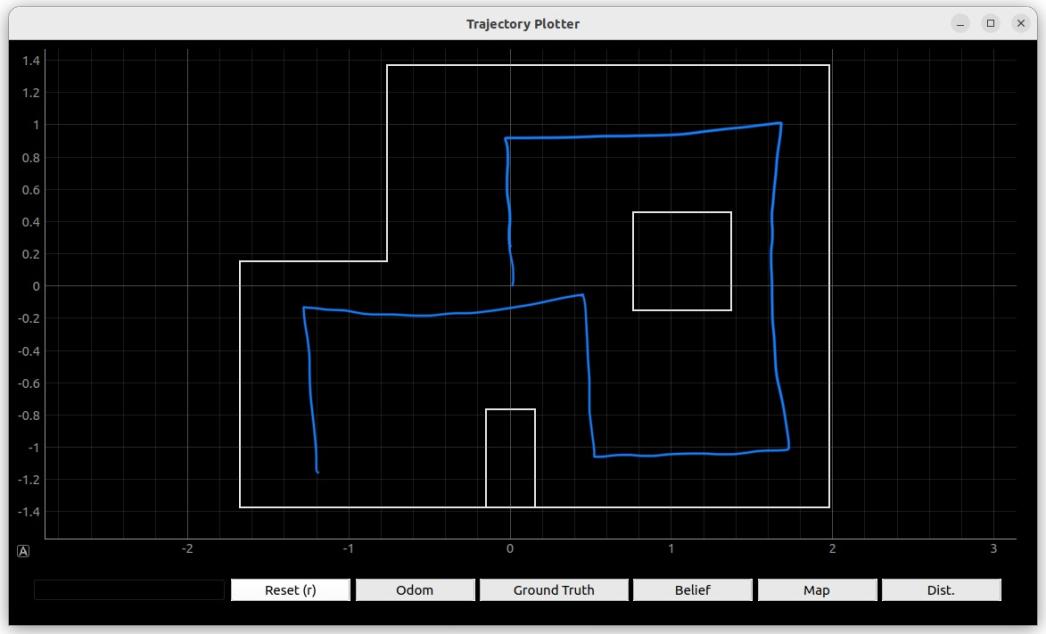
After multiple hours in the lab I was able to capture a successful run:
SUCCESSFUL RUN!
If I could change anything, I would have created a PI controller for both position and orientation. The reason for this is that I could have made my proportional gain small to allow my sensor to update fast enough and then used my integral gain to get zero steady state error. By only having a P controller, I was guaranteed to have a steady state error that scaled with the size of my gain value. Increasing gain would decrease steady state error but making gain large also lead to the robot moving too quickly so it wouldn’t be able to see the wall or it would overturn.
While I did not test the full run out again after performing it, I do believe it is repeatable with a fully charged battery. Often my results started suffering and swapping out a fresh battery fixed the issues. Also, I was able to get multiple parts of the trajectory to work in isolation before getting them to work together.